
TSPLIB文档-中文翻译
编辑TSPLIB 95
TSPLIB 是一个包含来自不同来源和类型的旅行商问题(TSP)及相关问题样本实例的库。以下问题类别的实例可供使用。
对称旅行商问题(TSP) 给定一组包含n个节点的集合以及每对节点之间的距离,找出一条总长度最小的回路,要求每个节点恰好访问一次。从节点i到节点j的距离与从节点j到节点i的距离相同。
哈密顿回路问题(HCP) 给定一个图,判断该图中是否存在哈密顿回路。
非对称旅行商问题(ATSP) 给定一组包含n个节点的集合以及每对节点之间的距离,找出一条总长度最小的回路,要求每个节点恰好访问一次。在这种情况下,从节点i到节点j的距离与从节点j到节点i的距离可能不同。
顺序排序问题(SOP) 该问题是一个带有额外约束的非对称旅行商问题。给定一组包含n个节点的集合以及每对节点之间的距离,找出一条从节点1到节点n的最短哈密顿路径,同时考虑给定的优先约束。每个优先约束要求某些节点i必须在其他节点j之前被访问。
带容量约束的车辆路径问题(CVRP) 给定n-1个节点、一个仓库以及从节点到仓库和节点之间的距离。所有节点的需求都可以由仓库满足。为了向节点送货,有相同容量的卡车可供使用。问题是找出总长度最小的卡车路线,以满足节点需求而不违反卡车容量约束。卡车的数量未指定。每条路线访问节点的子集,并以仓库为起点和终点。(备注:在某些数据文件中,给出了多个备选仓库。选择一个仓库即可确定一个CVRP。)
除了哈密顿回路问题外,所有问题都在完全图上定义,并且目前所有距离都是整数。可以要求在问题的解决方案中包含某些边。
1. 文件格式
每个文件由说明部分和数据部分组成。说明部分包含有关文件格式和内容的信息。数据部分包含具体数据。
1.1 说明部分
本节中的所有条目均采用 <keyword> : <value> 的形式,其中 <keyword> 表示字母数字关键字,<value> 表示字母数字数据或数值数据。术语 <string>、<integer> 和 <real> 分别表示字符串、整数或实数数据。在数据文件中,关键字的说明顺序(原则上)是任意的,但必须保持一致,即每当指定一个关键字时,都必须知道正确解释该关键字所需的所有必要信息。下面我们列出了所有可用的关键字。
1.1.1 NAME : <string>
标识数据文件。
1.1.2 TYPE : <string>
指定数据的类型。可能的类型有:
TSP:对称旅行商问题的数据
ATSP:非对称旅行商问题的数据
SOPData:顺序排序问题的数据
HCP:哈密顿回路问题的数据
CVRP:带容量约束的车辆路径问题的数据
TOUR:路线的集合
1.1.3 COMMENT : <string>
附加注释(通常在这里给出问题实例的贡献者或创建者的姓名)。
1.1.4 DIMENSION : <integer>
对于TSP或ATSP,维度是指其节点的数量。对于CVRP,它是指节点和仓库的总数。对于TOUR文件,它是指相应问题的维度。
1.1.5 CAPACITY : <integer>
在CVRP中指定卡车的容量。
1.1.6 EDGE WEIGHT TYPE : <string>
指定边权重(或距离)的给定方式。值包括:
EXPLICIT:在相应部分中明确列出权重
EUC_2D:二维空间中的欧几里得距离
EUC_3D:三维空间中的欧几里得距离
MAX_2D:二维空间中的最大距离
MAX_3D:三维空间中的最大距离
MAN_2D:二维空间中的曼哈顿距离
MAN_3D:三维空间中的曼哈顿距离
CEIL_2D:二维空间中的欧几里得距离向上取整
GEO:地理距离
ATT:针对att48和att532问题的特殊距离函数
XRAY1:针对晶体学问题的特殊距离函数(版本1)
XRAY2:针对晶体学问题的特殊距离函数(版本2)
SPECIAL:在其他地方有记录的特殊距离函数
1.1.7 EDGE WEIGHT FORMAT : <string>
如果边权重是明确给出的,则该字段描述边权重的格式。可选值包括:
FUNCTION:权重由函数给出(见上文)
FULL MATRIX:权重由一个完整的矩阵给出
UPPER_ROW:上三角矩阵(按行,不包括对角线元素)
LOWER_ROW:下三角矩阵(按行,不包括对角线元素)
UPPER_DIAG_ROW:上三角矩阵(按行,包括对角线元素)
LOWER_DIAG_ROW:下三角矩阵(按行,包括对角线元素)
UPPER_COL:上三角矩阵(按列,不包括对角线元素)
LOWER_COL:下三角矩阵(按列,不包括对角线元素)
UPPER_DIAG_COL:上三角矩阵(按列,包括对角线元素)
LOWER_DIAG_COL:下三角矩阵(按列,包括对角线元素)
1.1.8 EDGE DATA FORMAT : <string>
如果图不是完全图,则该字段描述图中边的给定格式。可选值包括:
EDGE LIST:图由边列表给出 ADJ LIST:图由邻接列表给出
1.1.9 NODE COORD TYPE : <string>
该字段指定是否每个节点都与坐标相关联(例如,坐标可用于图形显示或距离计算)。可选值包括:
TWOD COORDS:节点由二维坐标指定
THREED COORDS:节点由三维坐标指定
NO COORDS:节点没有相关联的坐标
默认值为NO COORDS。
1.1.10 DISPLAY DATA TYPE : <string>
该字段指定如何获得节点的图形显示。可选值包括:
COORD DISPLAY:根据节点坐标生成显示
TWOD DISPLAY:给出明确的二维坐标
NO DISPLAY:无法进行图形显示
如果指定了节点坐标,则默认值为COORD DISPLAY;否则为NO DISPLAY。
1.1.11 EOF :
表示输入数据的结束。此条目是可选的。
1.2 数据部分
根据所选规范,可能需要一些附加数据。这些数据在规范部分之后的相应数据部分中给出。每个数据部分都以相应的关键字开始。部分的长度要么从格式规范中隐式得知,要么由适当的节尾标识符终止。
1.2.1 节点坐标部分(NODE COORD SECTION):
本部分提供节点坐标。每行的格式为 <整数> <实数> <实数>
如果节点坐标类型为二维坐标(TWOD COORDS),或者 <整数> <实数> <实数> <实数>
如果节点坐标类型为三维坐标(THREED COORDS)。整数表示相应节点的编号。实数表示相关联的坐标。
1.2.2 仓库部分(DEPOT SECTION):
包含可能的替代仓库节点列表。该列表以-1终止。
1.2.3 需求部分(DEMAND SECTION):
容量受限的车辆路径问题(CVRP)中所有节点的需求以每行一个的形式给出 <整数> <整数>
第一个整数指定节点编号,第二个整数表示其需求。仓库节点也必须出现在此部分中,但它们的需求为0。
1.2.4 边数据部分(EDGE DATA SECTION):
图的边在边数据格式(EDGE DATA FORMAT)条目中允许的两种格式之一中指定。如果类型为边列表(EDGE LIST),则边以一系列如下形式的行给出 <整数> <整数>
每个条目给出某条边的终端节点。列表以-1终止。如果类型为邻接列表(ADJ LIST),则该部分由节点的邻接列表列表组成。 节点x的邻接列表指定为 <整数> <整数> ... <整数> -1
其中第一个整数给出节点x的编号,接下来的整数(以-1终止)是与x相邻的节点的编号。邻接列表列表以额外的-1终止。
1.2.5 固定边部分(FIXED EDGES SECTION):
本部分列出了在问题的每个解决方案中都必须出现的边。要固定的边以每行一个的形式给出,格式为 <整数> <整数>
这意味着从第一个节点到第二个节点的边(弧)必须包含在解决方案中。本部分以-1终止。
1.2.6 显示数据部分(DISPLAY DATA SECTION):
如果显示数据类型(DISPLAY DATA TYPE)为二维显示(TWOD DISPLAY),则生成显示所需的二维坐标以每行一个的形式给出,格式为 <整数> <实数> <实数>
整数指定相应的节点,实数给出相关联的坐标。
1.2.7 路径部分(TOUR_SECTION):
本部分指定了一组路径。每个路径由一组整数给出,这些整数表示在该路径中访问节点的顺序。每个这样的路径都以-1终止。额外的-1终止本部分。
1.2.8 边权重部分(EDGE_WEIGHT_SECTION):
边权重以边权重格式(EDGE WEIGHT FORMAT)条目中指定的格式给出。目前,所有显式数据都是整数,并以其中一种(自解释的)矩阵格式给出,其长度是隐式已知的。
2. 距离函数
对于边权重类型(EGDE WEIGHT TYPE)的各种选择,我们现在描述相应距离的计算方法。在每种情况下,我们都给出了一个(简化的)C语言实现,用于根据输入坐标计算距离。所有涉及浮点数的计算都以双精度算术进行。整数假定以32位字表示。由于距离需要是整数,因此我们将其四舍五入到最近的整数(在大多数情况下)。以下我们使用了四舍五入函数“nint”(“nint(x)”可以用“(int) (x+0.5)”替换)。
2.1 欧几里得距离(L2范数)
对于边权重类型为二维欧几里得(EUC 2D)和三维欧几里得(EUC 3D)的情况,必须为每个节点指定浮点坐标。设x[i]、y[i]和z[i]为节点i的坐标。
在二维情况下,两点i和j之间的距离计算如下:
xd = x[i] - x[j];
yd = y[i] - y[j];
dij = nint(sqrt(xd*xd + yd*yd));在三维情况下,我们有:
xd = x[i] - x[j];
yd = y[i] - y[j];
zd = z[i] - z[j];
dij = nint(sqrt(xd*xd + yd*yd + zd*zd));其中,sqrt是C语言中的平方根函数。
2.2 曼哈顿距离(L1范数)
如果边权重类型为二维曼哈顿(MAN_2D)或三维曼哈顿(MAN_3D),则距离以曼哈顿距离给出。
它们计算如下。
二维情况:
xd = abs(x[i] - x[j]);
yd = abs(y[i] - y[j]);
dij = nint(xd + yd);三维情况:
xd = abs(x[i] - x[j]);
yd = abs(y[i] - y[j]);
zd = abs(z[i] - z[j]);
dij = nint(xd + yd + zd);2.3 最大距离(L_∞范数)
如果边权重类型为二维最大(MAX_2D)或三维最大(MAX_3D),则计算最大距离。
二维情况:
// 注意:原代码中这一行是重复的,应删除一行
xd = abs(x[i] - x[j]);
yd = abs(y[i] - y[j]);
dij = max(nint(xd), nint(yd));三维情况:
xd = abs(x[i] - x[j]);
yd = abs(y[i] - y[j]);
zd = abs(z[i] - z[j]);
dij = max(nint(xd), nint(yd), nint(zd));2.4 地理距离
如果旅行推销员问题是一个地理问题,那么节点对应于点,两点之间的距离是它们在半径为 6378.388 千米的理想化球面上的距离。节点坐标给出了地球上相应点的地理经纬度。纬度和经度的形式为 DDD.MM,其中 DDD 为度,MM 为分。正纬度表示 “北”,负纬度表示 “南”。正经度表示 “东”,负纬度表示 “西”。例如,奥格斯堡的输入坐标为 48.23 和 10.53,即北纬 48 度 23 分,东经 10 度 53 分。
设x[i]和y[i]为城市i在上述格式中的坐标。首先将输入转换为以弧度给出的地理纬度和经度。
PI = 3.141592;
deg = nint(x[i]);
min = x[i] - deg;
latitude[i] = PI * (deg + 5.0 * min / 3.0) / 180.0;
deg = nint(y[i]);
min = y[i] - deg;
longitude[i] = PI * (deg + 5.0 * min / 3.0) / 180.0;然后,两个不同节点i和j之间的距离(以千米为单位)计算如下:
RRR = 6378.388;
q1 = cos( longitude[i] - longitude[j] );
q2 = cos( latitude[i] - latitude[j] );
q3 = cos( latitude[i] + latitude[j] );
dij = (int) ( RRR * acos( 0.5*((1.0+q1)*q2 - (1.0-q1)*q3) ) + 1.0);函数“acos”是余弦函数的反函数。
2.5 伪欧几里得距离
边权重类型ATT对应于一种特殊的“伪欧几里得”距离函数。设x[i]和y[i]为节点i的坐标。两点i和j之间的距离计算如下:
xd = x[i] - x[j];
yd = y[i] - y[j];
rij = sqrt((xd*xd + yd*yd) / 10.0);
tij = nint(rij);
if (tij < rij) dij = tij + 1;
else dij = tij;2.6 欧几里得距离的上限
边权重类型CEIL 2D要求将二维欧几里得距离向上取整到下一个整数。
2.7 晶体学问题的距离
我们已将如[1]中所述的晶体学问题纳入TSPLIB中。这些问题并未明确给出,但提供了子程序来生成该参考文献中提到的12个问题及其子问题(见第3.2节)。
为了计算这些问题的距离,必须考虑三个电机的移动。有两种类型的距离函数:一种假设电机速度相等(XRAY1),另一种使用不同的速度(XRAY2)。相应的距离函数在分发文件中以FORTRAN实现(文件deq.f和duneq.f)。
为了获得整数距离,我们建议将原始子程序计算的距离乘以100.0并四舍五入到最近的整数。
以下是我们为电机速度相等情况下在FORTRAN版本中修改的距离函数列表。
INTEGER FUNCTION ICOST(V,W)
INTEGER V,W
DOUBLE PRECISION DMIN1,DMAX1,DABS
DOUBLE PRECISION DISTP,DISTC,DISTT,COST
DISTP=DMIN1(DABS(PHI(V)-PHI(W)),DABS(DABS(PHI(V)-PHI(W))-360.0E+0))
DISTC=DABS(CHI(V)-CHI(W))
DISTT=DABS(TWOTH(V)-TWOTH(W))
COST=DMAX1(DISTP/1.00E+0,DISTC/1.0E+0,DISTT/1.00E+0)
C *** Make integral distances ***
ICOST=AINT(100.0E+0*COST+0.5E+0)
RETURN
END数字PHI(), CHI(), 和 TWOTH() 分别代表在生成的旅行商问题中点的x、y、z坐标。请注意,TSPLIB95仅包含原始的距离计算方法,没有上述修改。
2.8 验证
为了验证距离函数实现的正确性,我们给出了某些“标准”巡回路线1, 2, 3, ..., n的长度。
对于pcb442、gr666和att532的标准巡回路线长度分别为221,440、423,710和309,636。
对于问题xray14012(在[21]中考虑的第8个问题),使用XRAY1距离得出的标准巡回路线长度为15,429,219,而使用XRAY2距离得出的长度为12,943,294。
3. 库文件描述
在本节中,我们列出了当前可用的所有问题实例,以及关于最优巡回路线长度(如果已知)或其下界和上界的信息。
3.1 对称旅行商问题
旅行商问题实例包含在tsp目录中。表1给出了问题名称、城市数量、问题类型以及已知的最优巡回路线长度的下界和上界(单个数字表示已知最优长度)。条目MATRIX表示数据以1.1.7中的某一种矩阵格式给出。相应数据文件的名称是通过在问题名称后添加后缀“.tsp”获得的。还提供了一些最优巡回路线,对应的文件名以“.opt.tour”为后缀。

Table 1 Symmetric traveling salesman problems (Part I)

Table 1 Symmetric traveling salesman problems (Part II)

晶体学问题
在tsp目录下的xray.problems文件中,我们发布了由Bland和Shallcross编写的程序以及生成[1]中讨论的晶体学问题所需的数据。xray.problems文件是一个将后续提到的单个文件合并而成的文件。这些单个文件需要使用编辑器从xray.problems文件中提取。以下提供了原始文件:
read.me、deq.f、duneq.f、daux.f、gentsp.f
a.data、b.data、d.data、e.data、f.data此外,我们还包含了特别准备的数据文件,用于生成[1]中提到的12个问题。这些文件的命名从xray1.data到xray12.data。使用这些数据文件和gentsp.f程序,可以生成12个对称旅行商问题(TSP)。我们建议将这些问题实例分别命名为xray4472、xray2950、xray7008、xray2762、xray6922、xray9070、xray5888、xray14012、xray5520、xray13804、xray14464和xray13590。
为了验证生成程序的正确使用,我们列出了xray14012.tsp文件的部分内容。
NAME: xray14012
COMMENT: 晶体学问题8(Bland/Shallcross)
TYPE: TSP
DIMENSION: 14012
EDGE_WEIGHT TYPE: XRAY2
NODE_COORD_SECTION(节点坐标部分): (此处列出了从1到14012的节点坐标,以三个维度表示,例如): 1 -91.802854544029 -6.4097888697337 176.39830490027 ... 14012 88.197145450242 6.4097888697337 176.39830490027
3.2 哈密顿回路问题
哈密顿回路问题的实例包含在hcp目录中。目前,我们有以下数据文件:
alb1000.hcp、alb3000b.hcp、alb3000e.hcp、alb2000.hcp、alb3000c.hcp
alb4000.hcp、alb3000a.hcp、alb3000d.hcp、alb5000.hcp每个实例都包含一个哈密顿回路,该回路在相应的.opt.tour文件中给出。在alb4000问题实例中,有两个边是固定的。
除了这些文件外,该目录还包含了M. Jünger和G. Rinaldi编写的C程序tspleap.c。该程序可用于生成TSPLIB格式的TSP实例,这些实例源自以下问题:判断一个(r,s)跳跃者能否在mxn国际象棋棋盘上从某个方格开始,恰好访问每个方格一次,并返回起始方格。tspleap.c文件中提供了详细的文档说明。
3.3 非对称旅行商问题
表2列出了非对称旅行商问题(ATSP)的实例(位于atsp目录中)及其最优解值。相应数据文件的名称是通过在问题名称后添加后缀“.atsp”获得的。对于ftv90、ftv100、ftv110、ftv120、ftv130、ftv140、ftv150和ftv160这些问题,其数据文件并不存在。这些实例是从ftv170中获得的。例如,ftv120是由ftv170中前121个节点定义的子问题,ftv130是由前131个节点定义的,以此类推。
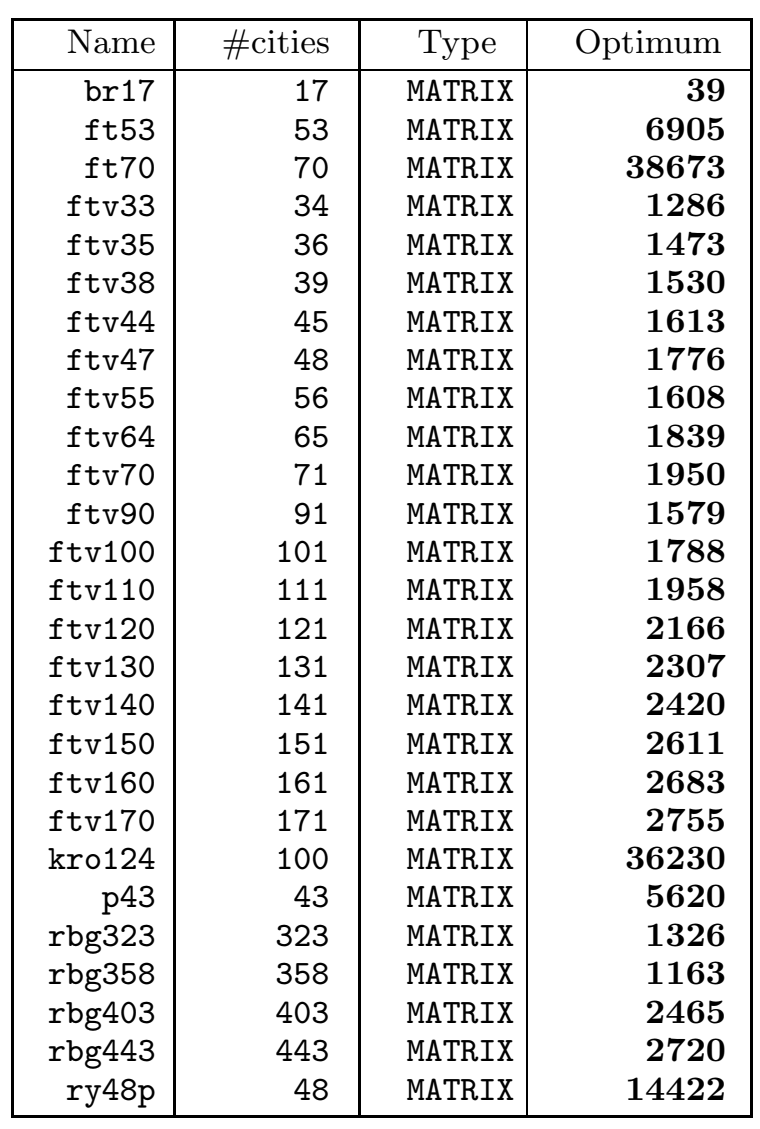
表 2 非对称旅行行商问题
3.4 序列排序问题
序列排序问题的每个实例都由一个完整的矩阵C给出,该矩阵具有以下特性。如果节点i必须在节点j之前,则Cji被设置为-1。假设矩阵C在优先关系上是传递闭包的,即如果i必须在j之前,且j必须在k之前,则可以推断出i必须在k之前,因此也必须将Cki设置为-1。由于我们要求在每个可行路径中,节点1是第一个节点,节点n是最后一个节点,因此序列排序问题(SOP)的实例总是满足:对于所有i=2,...,n,Ci1=-1;对于所有j=1,...,n-1,Cnj=-1。C1n被设置为无穷大。C的所有其他元素都是非负整数值。

表3 序列排序问题
表3列出了序列排序问题(SOP)的实例(位于sop目录中),以及这些实例的最优路径长度的已知下界和上界。相应数据文件的名称是通过在问题名称后添加后缀“.sop”获得的。
3.5 带容量约束的车辆路径问题
带容量约束的车辆路径问题的数据包含在vrp目录中。数据文件的后缀为“.vrp”。目前,我们拥有以下数据文件:
att48.vrp, eil30.vrp, eil7.vrp, eilB76.vrp, eil13.vrp, eil31.vrp, eilA101.vrp, eilC76.vrp, eil22.vrp, eil33.vrp, eilA76.vrp, eilD76.vrp, eil23.vrp, eil51.vrp, eilB101.vrp, gil262.vrp
基于这些数据集,可以定义各种问题,例如,根据车辆数量是否固定等条件,因此我们在这里不列出最优解。一些值已在数据文件中给出。
3.6 其他特殊文件
除了数据和解决方案文件外,库中还包含以下特殊文件:
TSPLIB VERSION:提供库的当前版本
README:TSPLIB的简短信息
DOC.PS:TSPLIB的描述(PostScript格式)
4. 备注
lin318问题原本是一个哈密顿路径问题。通过增加额外要求,即路径中包含从1到214的边,即可得到该问题。数据在linhp318.tsp文件中给出。
文献中有些数据集使用了不同的名称。下面我们给出了在[3]和[2]中使用的相应名称。
部分车辆路径问题也有TSP版本。在这种情况下,仓库只是被视为普通节点。gil262问题原本包含两个相同节点,其中一个已被删除。
潜在贡献者应向本库提供格式适当的数据文件,并联系: Gerhard Reinelt 海德堡大学应用数学研究所 德国海德堡,Neuenheimer Feld 294,D-69120 电话:(6221) 56 3171 传真:(6221) 56 5634 电子邮件:Gerhard.Reinelt@IWR.Uni-Heidelberg.DE
我们也欢迎提供有关库中问题的新界限或最优解的信息,以及计算研究的参考文献(将被列入参考文献列表)。
- 0
- 1
-
分享